


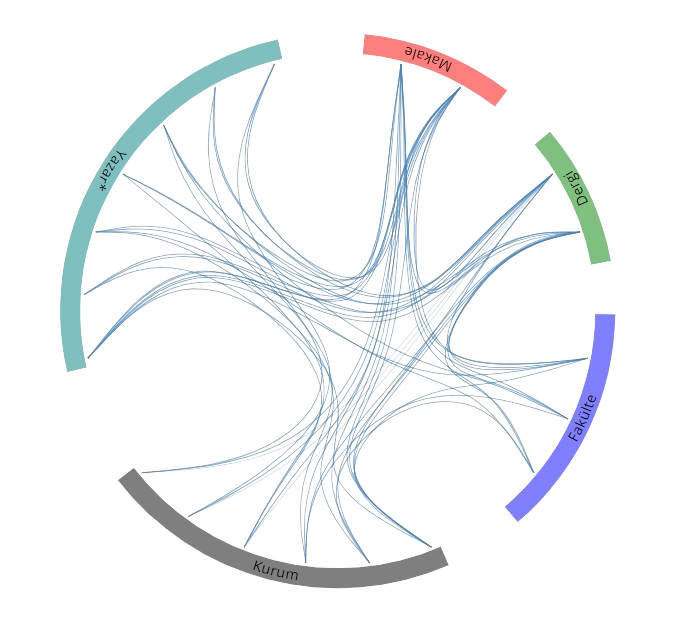
 Yayın Ağı
Yayın Ağı
SCI, SSCI ve AHCI İndekslerine Giren Dergilerde Yayınlanan Makaleler
Attitude filtering with uncertain process and measurement noise covariance using SVD-aided adaptive UKF
International Journal of Robust and Nonlinear Control
, cilt.33, sa.17, ss.10512-10531, 2023 (SCI-Expanded)

Integration of barometric and GPS altimeters via adaptive data fusion algorithm
INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING
, cilt.35, sa.1, ss.2-14, 2021 (SCI-Expanded)


Robust adaptive unscented Kalman filter for attitude estimation of pico satellites
INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING
, cilt.28, sa.2, ss.107-120, 2014 (SCI-Expanded)
Two-stage Kalman filter-based actuator/surface fault identification and reconfigurable control applied to F-16 fighter dynamics
INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING
, cilt.27, sa.9, ss.755-770, 2013 (SCI-Expanded)
UKF-Based Reconfigurable Attitude Parameters Estimation and Magnetometer Calibration
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS
, cilt.48, sa.3, ss.2614-2627, 2012 (SCI-Expanded)
Testing the covariance matrix of the innovation sequence with sensor/actuator fault detection applications
INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING
, cilt.24, sa.9, ss.717-730, 2010 (SCI-Expanded)
Fault detection in sensor information fusion Kalman filter
AEU-INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATIONS
, cilt.63, sa.9, ss.762-768, 2009 (SCI-Expanded)


Experimental Design in Problems Involving Measurement of the Mass of Petroleum Products in Storage Tanks
MEASUREMENT TECHNIQUES
, cilt.39, sa.6, ss.629-632, 1996 (SCI-Expanded)
Problems in Analyzing Hydrostatic Measurements of the Mass of Petroleum Products by Data Measurement Systems
MEASUREMENT TECHNIQUES
, cilt.37, sa.12, ss.1063-1067, 1994 (SCI-Expanded)
Diğer Dergilerde Yayınlanan Makaleler

Active fault tolerant flight control for UAV actuator failures
Mathematıcs In Engıneerıng, Scıence And Aerospace
, cilt.10, sa.4, ss.657-670, 2019 (Scopus)
Two-Stage Kalman Filter for Estimation of Wind Speed and UAV States by using GPS, IMU and Air Data System
WSEAS Transactions On Electronics
, cilt.10, ss.60-65, 2019 (Hakemli Dergi)
Hakemli Kongre / Sempozyum Bildiri Kitaplarında Yer Alan Yayınlar
Q-Adaptation of UKF Algorithm for Estimation of the Autonomous Underwater Vehicles Dynamics
Proceedings of the 5th International Conference of Control, Dynamic Systems, and Robotics (CDSR’xx18), Niagara Falls, 7 Haziran - 09 Mart 2018
Satellite Guidance and Control During OperativeOptoelectronic Imagery for Disaster Management
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 18 - 21 Mart 2018, ss.475
Q-Adaptation of SVD-aided UKF Algorithm for Nanosatellite Attitude Estimation
The 20th World Congress of the International Federation of Automatic Control, Toulouse, Fransa, 9 - 14 Temmuz 2017
Integrated SVD/EKF Attitude Estimation with UDFactorization of the Measurement Noise Covariance
8th International Conference on Recent Advances in Space Technologies - RAST 2017, 19 - 22 Haziran 2017
Geomagnetic Models at Low Earth Orbit and Their Use in Attitude Determination
8th International Conference on Recent Advances in Space Technologies - RAST 2017, 19 - 22 Haziran 2017
Nontraditional UKF Based Nanosatellite AttitudeEstimation with the Process and MeasurementNoise Covariances Adaptation
8th International Conference on Recent Advances in Space Technologies - RAST 2017, 19 - 22 Haziran 2017
Reconfigurable Fault Tolerant UAV Flight Control Against Actuator Faults
Australian Control Conference, Sidney, Avustralya, 3 - 04 Kasım 2016, ss.323-328
Sensor Fault Detection by Testing the Generalized Variance of the Innovation Covariance
XXI IMEKO World Congress, Çek Cumhuriyeti, 30 Ağustos - 04 Eylül 2015, ss.1181-1186
In Orbit Magnetometer Calibration Based on Linear Kalman Filtering
XXI IMEKO World Congress, Çek Cumhuriyeti, 30 Ağustos - 04 Eylül 2015, ss.1944-1949
Integrated SVD EKF for Small Satellite Attitude Determination and Rate Gyro Bias Estimation
2015 IFAC Workshop on Advanced Control and Navigation for Autonomous Aerospace Vehicles, Sevilla, İspanya, 10 - 12 Haziran 2015
Simultaneous adaptation of the process and measurement noise covariances for the UKF applied to nanosatellite attitude estimation
19th World Congress The International Federation of Automatic Control, 24 Ağustos 2014
Sensor Fault Detection by Testing the Largest Eigenvalue of the Innovation Covariance Using Tracy Widom Distribution
2010 American Control Conference, 30 Haziran - 02 Temmuz 2010, ss.5427-5432
UKF Based In Flight Calibration of Magnetometers and Rate Gyros for Pico Satellite Attitude Determination
17th Saint Petersburg International Conference On Integrated Navigation Systems, Rusya, 31 Mayıs - 02 Haziran 2010, ss.233-240
Aircraft icing detection identification and reconfigurable control based on Kalman filtering and neural networks
AIAA Atmospheric Flight Mechanics Conference and Exhibit 2005, San-Francisco, Kostarika, 15 - 17 Ağustos 2005
EKF based surface fault detection and reconfiguration in aircraft control systems
American Control Conference, 28 - 30 Haziran 2000
Fault Detection in Flight Control Systems via Innovation Sequence of Kalman Filter
UKACC International Conference on CONTROL’98, 1 - 04 Eylül 1998, cilt.455, ss.1528-1533
Kitap & Kitap Bölümleri
Metrikler
BM Sürdürülebilir Kalkınma Amaçları




