


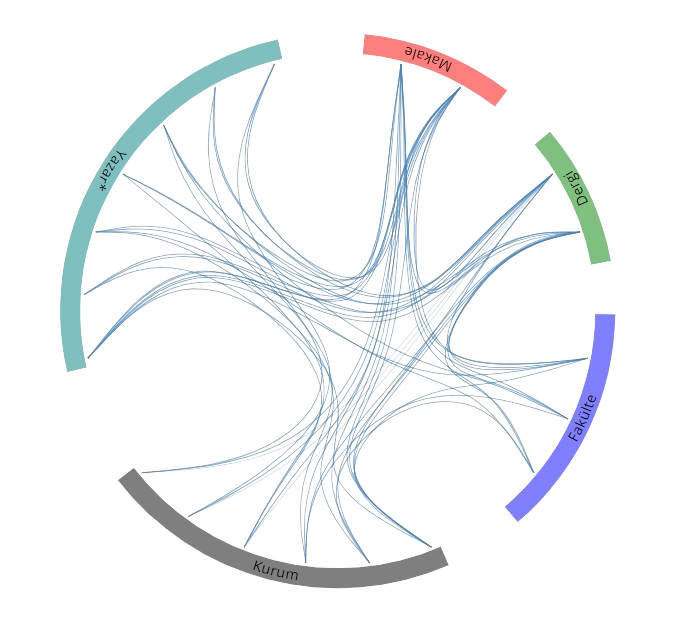
 Yayın Ağı
Yayın Ağı
SCI, SSCI ve AHCI İndekslerine Giren Dergilerde Yayınlanan Makaleler
A new speed planning method based on predictive curvature calculation for autonomous driving
TURKISH JOURNAL OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCES
, cilt.30, sa.4, ss.1555-1570, 2022 (SCI-Expanded)





Driving shaft lifetime enhancement by hybrid electrification
Proceedings Of The Institution Of Mechanical Engineers Part D-Journal Of Automobile Engineering
, cilt.233, sa.3, ss.572-584, 2019 (SCI-Expanded)
Design and implementation of a new speed planner for semiautonomous systems
TURKISH JOURNAL OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCES
, cilt.26, sa.2, ss.693-706, 2018 (SCI-Expanded)
Diğer Dergilerde Yayınlanan Makaleler
Hakemli Kongre / Sempozyum Bildiri Kitaplarında Yer Alan Yayınlar
State of Charge Estimation for Lithium-Ion Batteries In Electric and Hybrid Vehicles
11th INTERNATIONAL CONFERENCE onELECTRICAL and ELECTRONICS ENGINEERING, 28 Kasım 2019
Kitap & Kitap Bölümleri
Metrikler
BM Sürdürülebilir Kalkınma Amaçları


